ជាវប្រព័ន្ធផ្សព្វផ្សាយសង្គមរបស់យើងសម្រាប់ការបង្ហោះភ្លាមៗ
នៅក្នុងយុគសម័យនៃការរីកចម្រើនផ្នែកបច្ចេកវិទ្យាដ៏អស្ចារ្យ ប្រព័ន្ធរុករកបានលេចចេញជាសសរស្តម្ភគ្រឹះ ដែលជំរុញការរីកចម្រើនជាច្រើន ជាពិសេសនៅក្នុងវិស័យដែលមានសារៈសំខាន់ចំពោះភាពជាក់លាក់។ ដំណើរពីការរុករកលើមេឃជាមូលដ្ឋានរហូតដល់ប្រព័ន្ធរុករកនិចលភាពទំនើប (INS) បង្ហាញពីកិច្ចខិតខំប្រឹងប្រែងឥតឈប់ឈររបស់មនុស្សជាតិសម្រាប់ការរុករក និងភាពត្រឹមត្រូវខ្ពស់។ ការវិភាគនេះស៊ើបអង្កេតយ៉ាងស៊ីជម្រៅទៅលើមេកានិចដ៏ស្មុគស្មាញរបស់ INS ដោយស្វែងយល់ពីបច្ចេកវិទ្យាទំនើបៗនៃឧបករណ៍វាស់ស្ទង់សរសៃអុបទិក (FOGs) និងតួនាទីស្នូលនៃប៉ូឡារីសេក្នុងការរក្សារង្វិលជុំសរសៃ។
ផ្នែកទី 1៖ ការបកស្រាយប្រព័ន្ធរុករកនិចលភាព (INS)៖
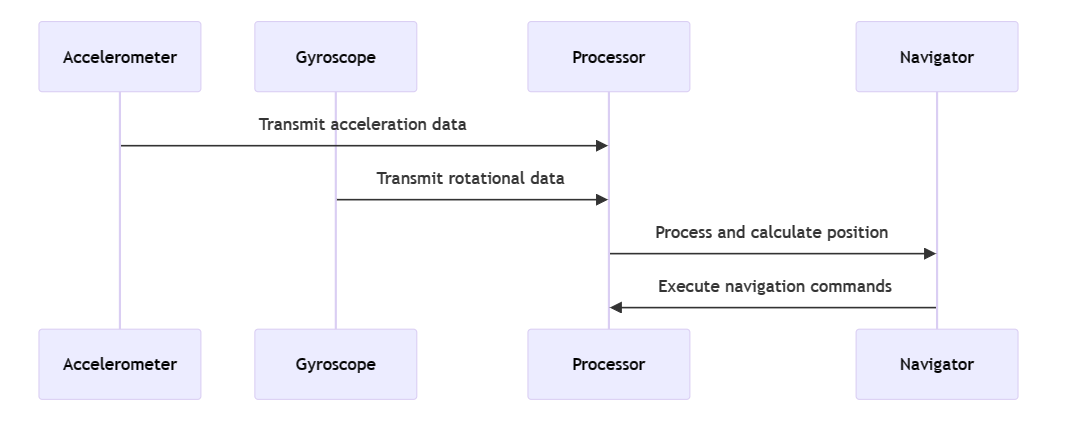
ប្រព័ន្ធរុករកនិចលភាព (INS) លេចធ្លោជាជំនួយរុករកស្វ័យប្រវត្តិ ដោយគណនាទីតាំង ទិសដៅ និងល្បឿនរបស់យានយន្តបានយ៉ាងច្បាស់លាស់ ដោយមិនគិតពីសញ្ញាខាងក្រៅ។ ប្រព័ន្ធទាំងនេះធ្វើសមកាលកម្មឧបករណ៍ចាប់សញ្ញាចលនា និងឧបករណ៍ចាប់សញ្ញាបង្វិល ដោយរួមបញ្ចូលគ្នាយ៉ាងរលូនជាមួយគំរូគណនាសម្រាប់ល្បឿនដំបូង ទីតាំង និងទិសដៅ។
INS បុរាណរួមមានសមាសធាតុសំខាន់ៗចំនួនបី៖
· ឧបករណ៍វាស់ល្បឿន៖ ធាតុសំខាន់ៗទាំងនេះចុះឈ្មោះការបង្កើនល្បឿនលីនេអ៊ែររបស់យានយន្ត ដោយបកប្រែចលនាទៅជាទិន្នន័យដែលអាចវាស់វែងបាន។
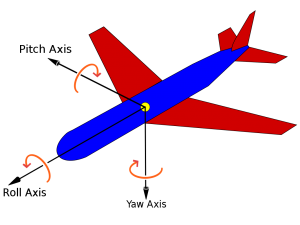
· ហ្គីរ៉ូស្កុប៖ សមាសធាតុសំខាន់សម្រាប់កំណត់ល្បឿនមុំ សមាសធាតុទាំងនេះគឺជាស្នូលសម្រាប់ការតំរង់ទិសប្រព័ន្ធ។
· ម៉ូឌុលកុំព្យូទ័រ៖ មជ្ឈមណ្ឌលសរសៃប្រសាទនៃ INS ដែលដំណើរការទិន្នន័យពហុទិដ្ឋភាព ដើម្បីទទួលបានការវិភាគទីតាំងជាក់ស្តែង។
ភាពស៊ាំរបស់ INS ចំពោះការរំខានពីខាងក្រៅធ្វើឱ្យវាមិនអាចខ្វះបាននៅក្នុងវិស័យការពារជាតិ។ ទោះជាយ៉ាងណាក៏ដោយ វាជួបប្រទះនឹង 'ការរសាត់' - ការចុះខ្សោយនៃភាពត្រឹមត្រូវបន្តិចម្តងៗ ដែលតម្រូវឱ្យមានដំណោះស្រាយទំនើបៗដូចជាការបញ្ចូលគ្នានៃឧបករណ៍ចាប់សញ្ញាសម្រាប់ការកាត់បន្ថយកំហុស (Chatfield, 1997)។
ផ្នែកទី 2. ឌីណាមិកប្រតិបត្តិការនៃ Gyroscope ខ្សែកាបអុបទិក៖
ឧបករណ៍វាស់ល្បឿនអុបទិកហ្វាយប៊ើរ (FOGs) ប្រកាសពីយុគសម័យនៃការផ្លាស់ប្តូរនៃការចាប់សញ្ញាបង្វិល ដោយទាញយកប្រយោជន៍ពីការជ្រៀតជ្រែករបស់ពន្លឺ។ ដោយមានភាពជាក់លាក់នៅក្នុងស្នូលរបស់វា FOGs គឺមានសារៈសំខាន់សម្រាប់ការរក្សាស្ថេរភាព និងការរុករករបស់យានជំនិះអវកាស។
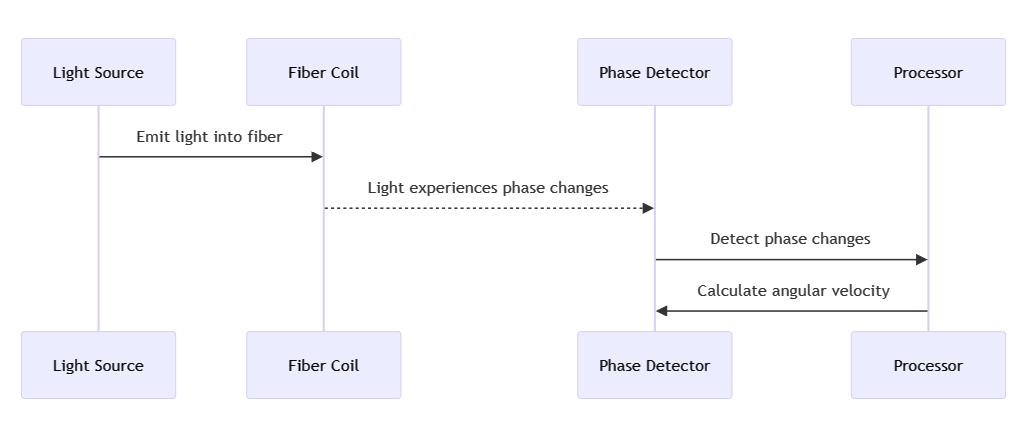
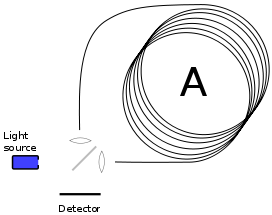
សរសៃអុបទិក (FOGs) ដំណើរការលើឥទ្ធិពល Sagnac ដែលពន្លឺឆ្លងកាត់ទិសដៅផ្ទុយគ្នានៅក្នុងរបុំសរសៃបង្វិល បង្ហាញការផ្លាស់ប្តូរដំណាក់កាលដែលជាប់ទាក់ទងនឹងការផ្លាស់ប្តូរអត្រាបង្វិល។ យន្តការដ៏ប៉ិនប្រសប់នេះបកប្រែទៅជារង្វាស់ល្បឿនមុំដ៏ច្បាស់លាស់។
សមាសធាតុសំខាន់ៗរួមមាន៖
· ប្រភពពន្លឺ៖ ចំណុចចាប់ផ្តើម ជាធម្មតាជាឡាស៊ែរ ដែលផ្តួចផ្តើមដំណើរពន្លឺដែលស៊ីសង្វាក់គ្នា។
· ខ្សែរុំសរសៃបំពង់អុបទិកដែលមានខ្សែរុំ ពន្យារគន្លងពន្លឺ ដោយហេតុនេះបង្កើនឥទ្ធិពល Sagnac។
· ឧបករណ៍ចាប់ពន្លឺ៖ សមាសធាតុនេះសម្គាល់លំនាំជ្រៀតជ្រែកស្មុគស្មាញនៃពន្លឺ។
ផ្នែកទី 3: សារៈសំខាន់នៃប៉ូឡារីស្យុងក្នុងការរក្សារង្វិលសរសៃ:
រង្វិលជុំសរសៃរក្សាប៉ូលារីហ្សាសិន (PM) ដែលជាស្នូលសម្រាប់ FOGs ធានានូវស្ថានភាពប៉ូលារីហ្សាសិនឯកសណ្ឋាននៃពន្លឺ ដែលជាកត្តាកំណត់ដ៏សំខាន់ក្នុងភាពជាក់លាក់នៃលំនាំជ្រៀតជ្រែក។ សរសៃឯកទេសទាំងនេះ ដែលប្រយុទ្ធប្រឆាំងនឹងការបែកខ្ចាត់ខ្ចាយរបៀបប៉ូលារីហ្សាសិន ជំរុញភាពរសើប FOG និងភាពត្រឹមត្រូវនៃទិន្នន័យ (Kersey, 1996)។
ការជ្រើសរើសសរសៃ PM ដែលត្រូវបានកំណត់ដោយតម្រូវការប្រតិបត្តិការ គុណលក្ខណៈរូបវន្ត និងភាពសុខដុមរមនាជាប្រព័ន្ធ មានឥទ្ធិពលលើរង្វាស់នៃការអនុវត្តទូទៅ។
ផ្នែកទី 4: ការអនុវត្ត និងភស្តុតាងជាក់ស្តែង៖
FOGs និង INS រកឃើញភាពស្រដៀងគ្នានៅទូទាំងកម្មវិធីចម្រុះ ចាប់ពីការរៀបចំការវាយប្រហារតាមអាកាសគ្មានមនុស្សបើក រហូតដល់ការធានាស្ថេរភាពភាពយន្តក្នុងចំណោមភាពមិនអាចទាយទុកជាមុនបាននៃបរិស្ថាន។ ភស្តុតាងនៃភាពជឿជាក់របស់ពួកគេគឺការដាក់ពង្រាយរបស់ពួកគេនៅក្នុងយាន Mars Rovers របស់ NASA ដែលជួយសម្រួលដល់ការរុករកក្រៅភពដោយសុវត្ថិភាព (Maimone, Cheng, and Matthies, 2007)។
គន្លងទីផ្សារព្យាករណ៍ពីទីផ្សារពិសេសដែលកំពុងរីកចម្រើនសម្រាប់បច្ចេកវិទ្យាទាំងនេះ ជាមួយនឹងវ៉ិចទ័រស្រាវជ្រាវដែលមានគោលបំណងពង្រឹងភាពធន់របស់ប្រព័ន្ធ ម៉ាទ្រីសភាពជាក់លាក់ និងវិសាលគមនៃការសម្របខ្លួន (MarketsandMarkets, 2020)។

ហ្គីរ៉ូស្កូបឡាស៊ែររាងជារង្វង់
គ្រោងការណ៍នៃម៉ាស៊ីនសរសៃអុបទិក-ហ្គីរ៉ូស្កូបដែលផ្អែកលើឥទ្ធិពលសាញ៉ាក់
ឯកសារយោង៖
- ឆាតហ្វៀល, អាល់ប៊ើរតាណា, ១៩៩៧។មូលដ្ឋានគ្រឹះនៃការរុករកនិចលភាពដែលមានភាពត្រឹមត្រូវខ្ពស់។វឌ្ឍនភាពក្នុងវិស័យអវកាស និងអាកាសចរណ៍, ភាគ ១៧៤។ រីស្តុន, វីជីនៀ៖ វិទ្យាស្ថានអាកាសចរណ៍ និងអវកាសអាមេរិក។
- Kersey, AD, et al., 1996. "ជីរ៉ូសរសៃអុបទិក៖ 20 ឆ្នាំនៃការរីកចម្រើនផ្នែកបច្ចេកវិទ្យា" ក្នុងកិច្ចដំណើរការនីតិវិធីរបស់ IEEE,84(12), ទំព័រ 1830-1834។
- Maimone, MW, Cheng, Y., និង Matthies, L., 2007. "ចម្ងាយវាស់ស្ទង់ដែលមើលឃើញនៅលើយានរុករកភពអង្គារ - ឧបករណ៍មួយដើម្បីធានាបាននូវការបើកបរត្រឹមត្រូវ និងការថតរូបភាពវិទ្យាសាស្ត្រ"ទស្សនាវដ្តី IEEE Robotics & Automation,14(2), ទំព័រ 54-62។
- MarketsandMarkets, 2020។ "ទីផ្សារប្រព័ន្ធរុករកនិចលភាពតាមថ្នាក់ បច្ចេកវិទ្យា ការអនុវត្ត សមាសធាតុ និងតំបន់ - ការព្យាករណ៍សកលដល់ឆ្នាំ 2025"។
ការបដិសេធ:
- យើងខ្ញុំសូមប្រកាសថា រូបភាពមួយចំនួនដែលបង្ហាញនៅលើគេហទំព័ររបស់យើងខ្ញុំ ត្រូវបានប្រមូលពីអ៊ីនធឺណិត និងវិគីភីឌា សម្រាប់គោលបំណងនៃការលើកកម្ពស់ការអប់រំ និងការចែករំលែកព័ត៌មាន។ យើងខ្ញុំគោរពសិទ្ធិបញ្ញារបស់អ្នកបង្កើតដើមទាំងអស់។ រូបភាពទាំងនេះត្រូវបានប្រើប្រាស់ដោយមិនមានបំណងចង់ចំណេញផ្នែកពាណិជ្ជកម្មឡើយ។
- ប្រសិនបើអ្នកជឿថាខ្លឹមសារណាមួយដែលប្រើប្រាស់រំលោភលើកម្មសិទ្ធិបញ្ញារបស់អ្នក សូមទាក់ទងមកយើងខ្ញុំ។ យើងខ្ញុំមានឆន្ទៈយ៉ាងមុតមាំក្នុងការចាត់វិធានការសមស្រប រួមទាំងការលុបរូបភាពចេញ ឬការផ្តល់ភាពជាម្ចាស់កម្មសិទ្ធិត្រឹមត្រូវ ដើម្បីធានាបាននូវការអនុលោមតាមច្បាប់ និងបទប្បញ្ញត្តិស្តីពីកម្មសិទ្ធិបញ្ញា។ គោលបំណងរបស់យើងគឺរក្សាវេទិកាមួយដែលសម្បូរទៅដោយខ្លឹមសារ យុត្តិធម៌ និងគោរពសិទ្ធិកម្មសិទ្ធិបញ្ញារបស់អ្នកដទៃ។
- សូមទាក់ទងមកយើងខ្ញុំតាមរយៈវិធីទំនាក់ទំនងខាងក្រោមemail: sales@lumispot.cnយើងខ្ញុំប្តេជ្ញាចាត់វិធានការភ្លាមៗនៅពេលទទួលបានការជូនដំណឹងណាមួយ ហើយធានាកិច្ចសហប្រតិបត្តិការ 100% ក្នុងការដោះស្រាយបញ្ហាបែបនេះ។
ពេលវេលាបង្ហោះ៖ ថ្ងៃទី ១៨ ខែតុលា ឆ្នាំ ២០២៣