
ជាវប្រព័ន្ធផ្សព្វផ្សាយសង្គមរបស់យើងសម្រាប់ការបង្ហោះភ្លាមៗ
នៅក្នុងយុគសម័យនៃការរីកចម្រើនផ្នែកបច្ចេកវិទ្យា ប្រព័ន្ធរុករកបានលេចចេញជាសសរស្តម្ភគ្រឹះ ដែលជំរុញឱ្យមានការជឿនលឿនជាច្រើន ជាពិសេសនៅក្នុងវិស័យជាក់លាក់-សំខាន់។ដំណើរពីការរុករកសេឡេស្ទាលតាមលំដាប់លំដោយទៅកាន់ប្រព័ន្ធរុករក Inertial Navigation Systems (INS) ស្មុគ្រស្មាញ បង្ហាញពីការខិតខំប្រឹងប្រែងដែលមិនអាចទទួលយកបានរបស់មនុស្សជាតិសម្រាប់ការរុករក និងកំណត់ភាពត្រឹមត្រូវ។ការវិភាគនេះស្វែងយល់យ៉ាងស៊ីជម្រៅទៅក្នុងយន្តការដ៏ស្មុគស្មាញរបស់ INS ដោយស្វែងយល់ពីបច្ចេកវិជ្ជាទំនើបនៃ Fiber Optic Gyroscopes (FOGs) និងតួនាទីសំខាន់នៃ Polarization ក្នុងការថែរក្សា Fiber Loops។
ផ្នែកទី 1៖ ការឌិគ្រីបប្រព័ន្ធរុករកនិចលភាព (INS)៖
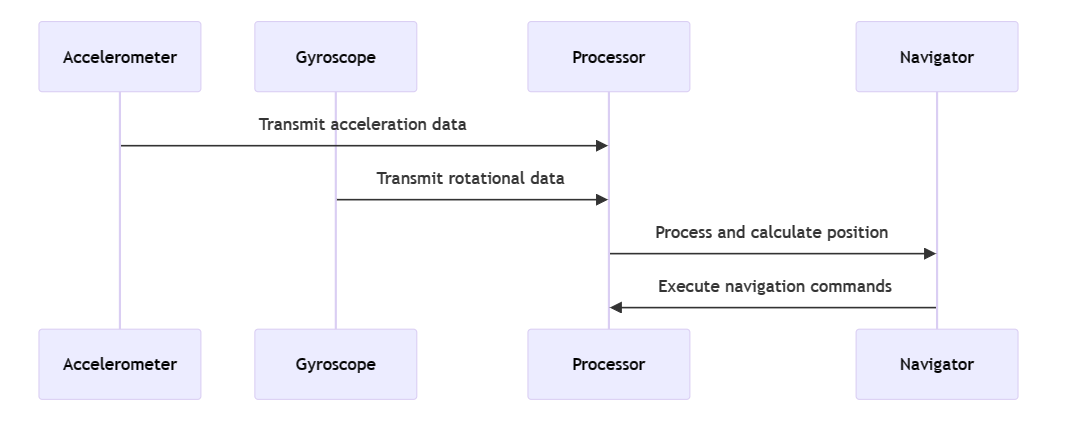
Inertial Navigation Systems (INS) លេចធ្លោជាជំនួយការរុករកស្វយ័ត ដោយគណនាយ៉ាងជាក់លាក់នូវទីតាំង ការតំរង់ទិស និងល្បឿនរបស់យាន ដោយមិនគិតពីសញ្ញាខាងក្រៅ។ប្រព័ន្ធទាំងនេះសម្របសម្រួលចលនា និងឧបករណ៍ចាប់សញ្ញាបង្វិល ដោយរួមបញ្ចូលគ្នាយ៉ាងរលូនជាមួយគំរូគណនាសម្រាប់ល្បឿនដំបូង ទីតាំង និងការតំរង់ទិស។
archetypal INS រួមបញ្ចូលសមាសធាតុសំខាន់ៗចំនួនបី៖
· Accelerometers៖ ធាតុសំខាន់ៗទាំងនេះចុះបញ្ជីការបង្កើនល្បឿនលីនេអ៊ែររបស់រថយន្ត ដោយបកប្រែចលនាទៅជាទិន្នន័យដែលអាចវាស់វែងបាន។
· Gyroscopes៖ អាំងតេក្រាលសម្រាប់កំណត់ល្បឿនមុំ សមាសធាតុទាំងនេះមានសារៈសំខាន់សម្រាប់ការតំរង់ទិសប្រព័ន្ធ។
· ម៉ូឌុលកុំព្យូទ័រ៖ មជ្ឈមណ្ឌលសរសៃប្រសាទនៃ INS ដំណើរការទិន្នន័យពហុមុខ ដើម្បីផ្តល់ការវិភាគទីតាំងតាមពេលវេលាជាក់ស្តែង។
អភ័យឯកសិទ្ធិរបស់ INS ចំពោះការរំខានពីខាងក្រៅធ្វើឱ្យវាមិនអាចខ្វះបាននៅក្នុងវិស័យការពារជាតិ។ទោះយ៉ាងណាក៏ដោយ វាជួបជាមួយនឹង 'រសាត់' - ការបំបែកភាពត្រឹមត្រូវបន្តិចម្តងៗ ត្រូវការដំណោះស្រាយស្មុគ្រស្មាញ ដូចជាការលាយឧបករណ៍ចាប់សញ្ញាសម្រាប់ការបន្ធូរបន្ថយកំហុស (Chatfield, 1997)។
ផ្នែកទី 2. ថាមវន្តប្រតិបត្តិការនៃ Fiber Optic Gyroscope៖
Fiber Optic Gyroscopes (FOGs) ប្រកាសពីយុគសម័យនៃការផ្លាស់ប្តូរនៅក្នុងការចាប់សញ្ញាបង្វិល ដោយប្រើប្រាស់ការជ្រៀតជ្រែករបស់ពន្លឺ។ជាមួយនឹងភាពជាក់លាក់នៃស្នូលរបស់វា FOGs មានសារៈសំខាន់សម្រាប់ស្ថេរភាព និងការរុករករបស់យានអវកាស។
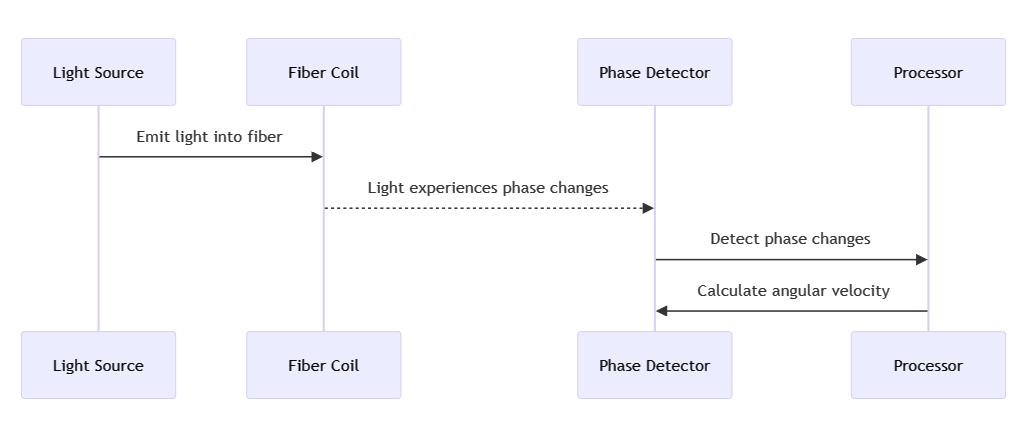
FOGs ដំណើរការលើបែបផែន Sagnac ជាកន្លែងដែលពន្លឺឆ្លងកាត់ក្នុងទិសដៅផ្ទុយនៅក្នុងឧបករណ៏បង្វិល បង្ហាញពីការផ្លាស់ប្តូរដំណាក់កាលដែលទាក់ទងជាមួយនឹងការផ្លាស់ប្តូរអត្រាបង្វិល។យន្តការដែលខុសគ្នានេះប្រែទៅជាម៉ែត្រល្បឿនមុំច្បាស់លាស់។
សមាសធាតុសំខាន់ៗរួមមានៈ
· ប្រភពពន្លឺ៖ ចំណុចចាប់ផ្តើម ជាទូទៅឡាស៊ែរ ចាប់ផ្តើមដំណើរពន្លឺដែលជាប់គ្នា។
· ខ្សែសរសៃ៖ បំពង់អុបទិកដែលមានរាងជារាងមូល អូសបន្លាយគន្លងរបស់ពន្លឺ ដោយហេតុនេះនឹងពង្រីកឥទ្ធិពល Sagnac ។
· ឧបករណ៍ចាប់រូបភាព៖ សមាសធាតុនេះដឹងពីគំរូនៃការជ្រៀតជ្រែកដ៏ស្មុគស្មាញនៃពន្លឺ។
ផ្នែកទី 3៖ សារៈសំខាន់នៃការរក្សារាងប៉ូលដែលរក្សារង្វិលជុំសរសៃ៖
Polarization Maintaining (PM) Fiber Loops ដែលមានសារៈសំខាន់សម្រាប់ FOGs ធានានូវស្ថានភាពពន្លឺនៃប៉ូឡារីហ្សីហ្សីហ្សីសិន ដែលជាកត្តាកំណត់សំខាន់ក្នុងភាពជាក់លាក់នៃលំនាំជ្រៀតជ្រែក។សរសៃឯកទេសទាំងនេះ ប្រយុទ្ធប្រឆាំងនឹងការបែកខ្ចាត់ខ្ចាយនៃទម្រង់ប៉ូលឡាស៊ែរ ពង្រឹងភាពប្រែប្រួលនៃ FOG និងភាពត្រឹមត្រូវនៃទិន្នន័យ (Kersey, 1996) ។
ការជ្រើសរើសសរសៃ PM ដែលកំណត់ដោយ exigencies ប្រតិបត្តិការ លក្ខណៈរូបវន្ត និងភាពសុខដុមរមនាជាប្រព័ន្ធ ជះឥទ្ធិពលលើរង្វាស់នៃការអនុវត្ត។
ផ្នែកទី 4៖ កម្មវិធី និងភស្តុតាងជាក់ស្តែង៖
FOGs និង INS ស្វែងរកការអនុលោមតាមកម្មវិធីចម្រុះ ពីការរៀបចំការហោះហើរលើអាកាសដែលគ្មានមនុស្សបើក រហូតដល់ការធានានូវស្ថេរភាពភាពយន្ត ចំពេលមិនអាចទាយទុកជាមុនបានពីបរិស្ថាន។សក្ខីកម្មនៃភាពជឿជាក់របស់ពួកគេគឺការដាក់ពង្រាយរបស់ពួកគេនៅក្នុងយាន Mars Rovers របស់អង្គការណាសា ដែលជួយសម្រួលដល់ការរុករកក្រៅភពដែលមិនមានសុវត្ថិភាព (Maimone, Cheng, and Matthies, 2007)។
គន្លងទីផ្សារព្យាករណ៍ពីទីផ្សារពិសេសដែលកំពុងរីកចម្រើនសម្រាប់បច្ចេកវិទ្យាទាំងនេះ ជាមួយនឹងវ៉ិចទ័រស្រាវជ្រាវដែលមានគោលបំណងពង្រឹងភាពធន់របស់ប្រព័ន្ធ ភាពជាក់លាក់ម៉ាទ្រីស និងវិសាលភាពនៃការសម្របខ្លួន (MarketsandMarkets, 2020) ។

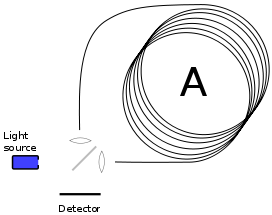
Ring laser gyroscope
គ្រោងការណ៍នៃ fiber-optic-gyroscope ផ្អែកលើឥទ្ធិពល sagnac
ឯកសារយោង៖
- Chatfield, AB, 1997 ។មូលដ្ឋានគ្រឹះនៃការរុករក Inertial ភាពត្រឹមត្រូវខ្ពស់។វឌ្ឍនភាពក្នុងវិស័យអវកាស និងអាកាសយានិក វ៉ុល។174. Reston, VA: វិទ្យាស្ថានអាកាសចរណ៍ និងអវកាសអាមេរិក។
- Kersey, AD, et al., 1996. "Fiber Optic Gyros: 20 Years of Technology Advancement," inដំណើរការនៃ IEEE,84(12) ទំព័រ 1830-1834 ។
- Maimone, MW, Cheng, Y., and Matthies, L., 2007. "Visual Odometry on the Mars Exploration Rovers - ឧបករណ៍មួយដើម្បីធានាបាននូវការបើកបរត្រឹមត្រូវ និងរូបភាពវិទ្យាសាស្រ្ត"ទស្សនាវដ្តី IEEE មនុស្សយន្ត និងស្វ័យប្រវត្តិកម្ម,១៤(២) ទំព័រ ៥៤-៦២។
- MarketsandMarkets, 2020. "ទីផ្សារប្រព័ន្ធរុករក Inertial តាមចំណាត់ថ្នាក់ បច្ចេកវិទ្យា កម្មវិធី សមាសភាគ និងតំបន់ - ការព្យាករណ៍ជាសកលដល់ឆ្នាំ 2025 ។"
ការបដិសេធ:
- យើងសូមប្រកាសថា រូបភាពមួយចំនួនដែលបង្ហាញនៅលើគេហទំព័ររបស់យើងត្រូវបានប្រមូលពីអ៊ីនធឺណិត និងវិគីភីឌា សម្រាប់គោលបំណងនៃការអប់រំបន្ថែម និងការចែករំលែកព័ត៌មាន។យើងគោរពសិទ្ធិកម្មសិទ្ធិបញ្ញារបស់អ្នកបង្កើតដើមទាំងអស់។រូបភាពទាំងនេះត្រូវបានគេប្រើដោយមិនមានចេតនាចង់ចំណេញខាងពាណិជ្ជកម្មទេ។
- ប្រសិនបើអ្នកជឿថាខ្លឹមសារណាមួយដែលបានប្រើបំពានលើការរក្សាសិទ្ធិរបស់អ្នក សូមទាក់ទងមកយើងខ្ញុំ។យើងមានឆន្ទៈក្នុងការចាត់វិធានការសមស្រប រួមទាំងការលុបរូបភាព ឬការផ្តល់គុណលក្ខណៈត្រឹមត្រូវ ដើម្បីធានាឱ្យបាននូវការអនុលោមតាមច្បាប់ និងបទប្បញ្ញត្តិកម្មសិទ្ធិបញ្ញា។គោលបំណងរបស់យើងគឺដើម្បីរក្សាវេទិកាដែលសម្បូរទៅដោយខ្លឹមសារ យុត្តិធម៌ និងការគោរពកម្មសិទ្ធិបញ្ញារបស់អ្នកដទៃ។
- សូមទាក់ទងមកយើងខ្ញុំតាមវិធីទំនាក់ទំនងខាងក្រោម,email: sales@lumispot.cn.យើងប្តេជ្ញាចាត់វិធានការភ្លាមៗនៅពេលបានទទួលការជូនដំណឹងណាមួយ និងធានាឱ្យមានកិច្ចសហប្រតិបត្តិការ 100% ក្នុងការដោះស្រាយបញ្ហាទាំងនោះ។
ពេលវេលាបង្ហោះ៖ ថ្ងៃទី ១៨-តុលា ២០២៣